Covariance dans l’estimation de l’incertitude de mesure
Suivant les recommandations du GUM, il est d’usage d’analyser un processus d’étalonnage en établissant un bilan d’incertitude, c’est à dire en listant toutes, ou du moins le plus grand nombre, de causes d’incertitude. Les différentes composantes d’incertitudes sont quantifiées à l’aide d’une méthode de type A ou de type B. L’incertitude est alors déduite en sommant en variance ces incertitudes type. Dans cette dernière étape, on oublie souvent de tenir compte de la covariance entre les causes d’incertitude, c’est à dire de leur indépendance. En effet, certaines incertitudes n’ont pas nécessairement eu le temps de s’exprimer totalement c’est-à-dire de varier sur toute leur plage de variation possible pendant la durée d’un étalonnage par exemple (l’effet inter-opérateur lorsque le même opérateur effectue l’étalonnage d’un instrument). D’autres sources d’incertitude sont intimement liées entre elles et varient de concert pendant la mesure (par exemple la température de l’étalon et du moyen). En complétant le tableau classique de bilan de causes d’incertitude, et en s’appuyant sur le concept de variance HO et LO, cet article présente une méthode pour tenir compte et estimer les covariances. La méthode est présentée ici dans le cadre d’un étalonnage.
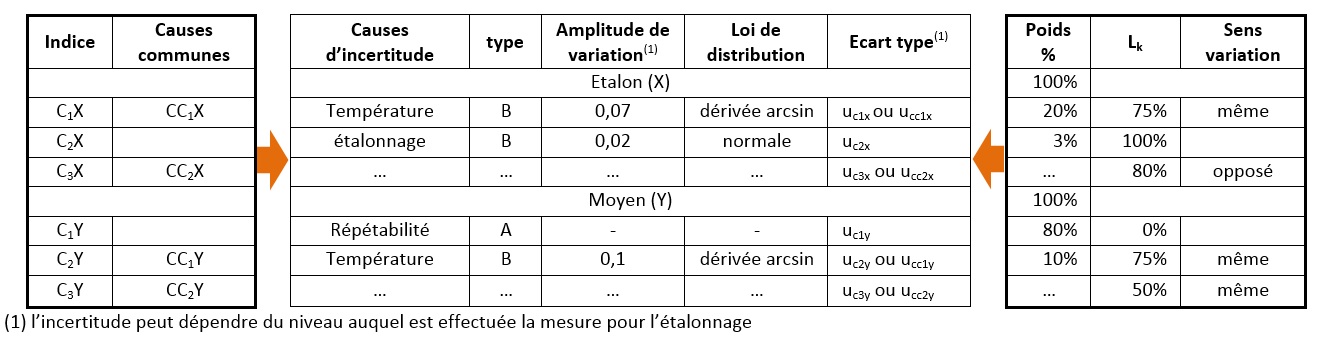
Colonne indice : Il est nécessaire de séparer les causes d’incertitudes entre l’étalon et le moyen. L’indice X correspond aux incertitudes liées à l’étalon, l’indice Y celles du moyen.
Colonne causes communes : Cette colonne permet d’identifier les causes d’incertitude qui varient de concert entre l’étalon et le moyen lors de l’étalonnage.
Colonne poids % : C’est le poids en % de la cause d’incertitude ramené à l’incertitude globale sur la valeur de l’étalon ou bien celle fournie par le moyen.
Colonne Lk (variances HO et LO) : La variance caractérise la plage de variation de la cause d’incertitude. Par contre elle ne définit pas si la cause a eu l’opportunité de varier pendant l’opération d’étalonnage. Certaines sources ont une forte opportunité de varier, elles sont qualifiées de « High Opportunity » (HO) et d’autres au contraire varient peu ou pas et sont qualifiées de « Low Opportunity » (LO). Un coefficient, nommé Lk, est associé à la source d’incertitude et permet de quantifier sa stabilité pendant la durée d’étalonnage. L’évaluation du Lk est basée sur la connaissance et l’expérience acquise sur le processus étudié.
Colonne sens de variation : La colonne « sens de variation » indique si une variation du phénomène d’incertitude (par exemple température) engendre une variation dans le même sens que la source d’incertitude (par exemple dilatation ou rétractation de la pièce). On modélise les sens de variation « même » et « opposé » respectivement par +1 et -1.
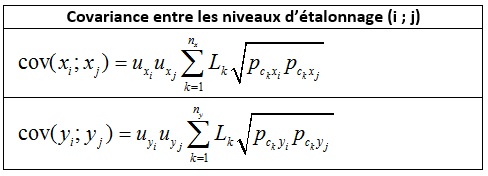
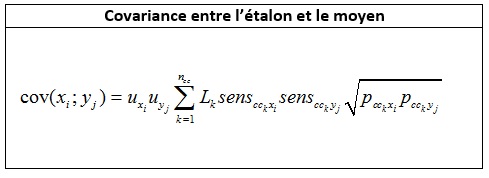
Ces formules sont notamment utilisées pour déterminer la matrice de covariances lors de l’estimation de la courbe d’étalonnage selon les méthodes proposées par le guide technique du Collège Français de Métrologie « Application du nouveau concept d’étalonnage du VIM 3 (2012) ». Il est bien entendu possible d’utiliser ce principe dans d’autres cas que celui de l’étalonnage et notamment pour les calculs d’incertitude dans lesquels la covariance n’est pas négligeable.
La justification et le détail des calculs sont présentés dans l’article « Covariance dans le processus d’étalonnage » présenté au 16e congrès international de métrologie 2013.